| Citation: |
LI Wangnian,LU Chengda,ZHANG Youzhen,et al. Tracking control of drilling robot feed force based on an equivalent-input-disturbance[J]. Coal Geology & Exploration,2023,51(9):171−179. DOI: 10.12363/issn.1001-1986.23.06.0337

|
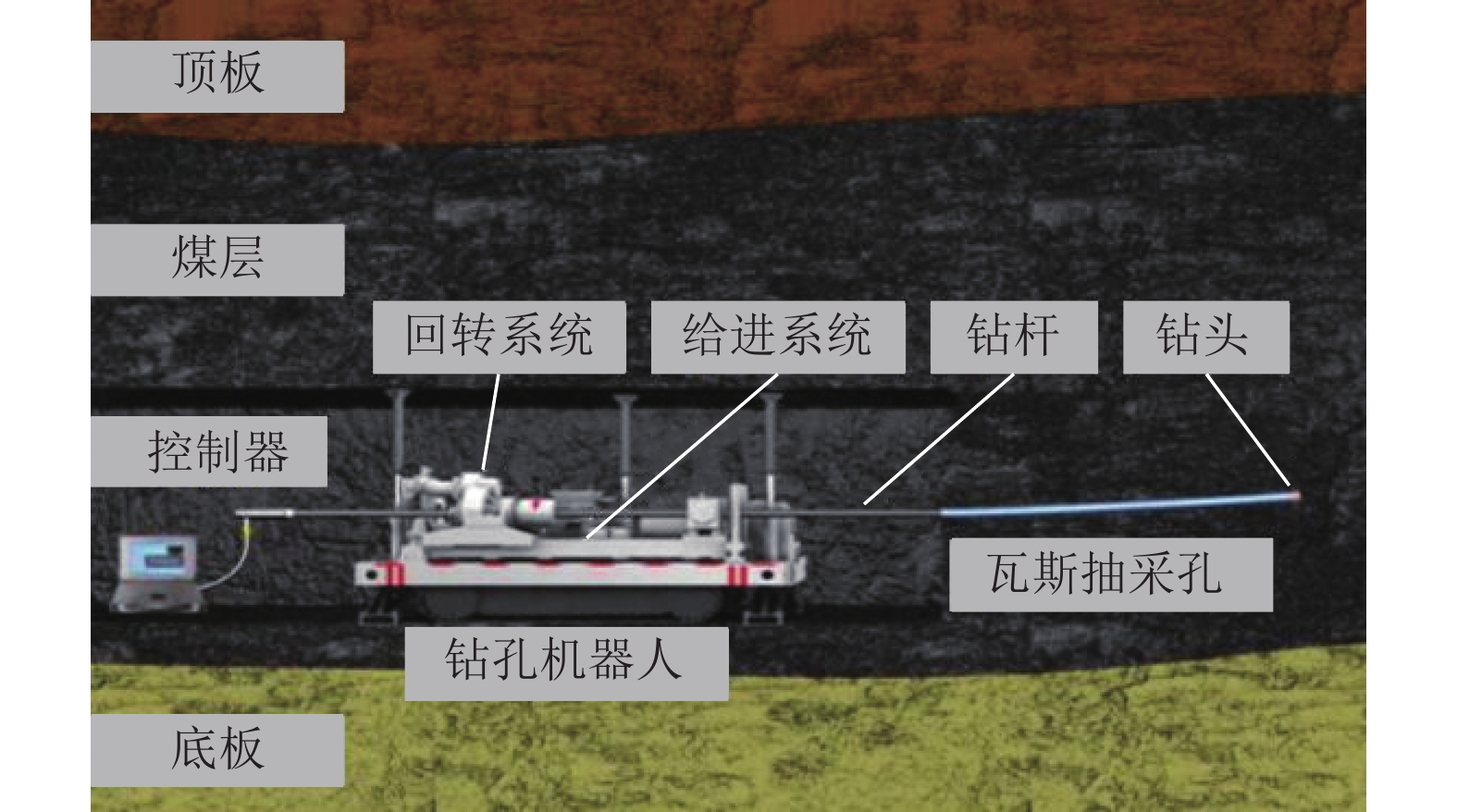
During the underground construction of gas extraction hole in coal mine, the feeding system of drilling robot is used for pressurization, decompression and feeding in drilling process. In view of the problem that the uncertain disturbance of complex strata affects the working performance of drilling robot and the quality and efficiency of drilling construction, the structural composition and drilling construction technology of drilling robot were analyzed at first. The mathematical model of pressure reducing valve control was established according to the working principle of its feed system, and the mapping relationship between the control input, the electromagnet current, and the control output, the outlet pressure of pressure reducing valve, was obtained. Then, control modeling was conducted for the whole feed system on the basis of defining the driving mode of feed force. Secondly, the feed force tracking control system of the drilling robot was designed. Meanwhile, the Luenburger full-state observer was used to reconstruct the state of the controlled object, and the control structure based on equivalent-input-disturbance (EID) estimation and compensation was established. Besides, the gain matrix was designed for the state feedback controller, state observer and disturbance estimator, to realize the stability of the feed force closed-loop control system with satisfactory tracking and disturbance suppression performance. Finally, the numerical simulation model was built using the Matlab software. Specifically, the simulation research was carried out with the measured drilling data signal of the feed system in the actual drilling construction of a coal mine. In addition, the external disturbance signal was designed with the feed force as the control target and the measured pressure fluctuation of the pressure reducing valve as the basis. Further, comparative simulation was conducted with the proposed EID control method and PID control method respectively. The results show that the proposed method has a smaller peak-to-peak value of the steady-state tracking error than the PID method, as well as a smaller tracking error, which ensures the stable operation of the feed system and has better tracking and disturbance suppression performance. Generally, the research results of this paper provide a control theoretical basis for improving the adaptability of drilling robots to complex coal seam load changes, and ensuring their working performance and safe and efficient construction.
| [1] |
王浩. 防冲钻孔机器人钻具姿态监测方法研究[D]. 徐州: 中国矿业大学, 2022.
WANG Hao. Research on the posture monitoring method of drilling tool in drilling robot for rockburst prevention[D]. Xuzhou: China University of Mining and Technology, 2022.
|
| [2] |
李生朋,陶彪,刘陈,等. 隧道钻孔机器人及其运动学分析[J]. 工程机械,2021,52(7):40−45. DOI: 10.3969/j.issn.1000-1212.2021.07.010
LI Shengpeng,TAO Biao,LIU Chen,et al. Tunnel drilling robot and its kinematics analysis[J]. Construction Machinery and Equipment,2021,52(7):40−45. DOI: 10.3969/j.issn.1000-1212.2021.07.010
|
| [3] |
杨扬,陈柏,王尧尧. 建筑钻孔机器人的振动与控制研究[J]. 机电工程,2019,36(6):596−601. DOI: 10.3969/j.issn.1001-4551.2019.06.008
YANG Yang,CHEN Bai,WANG Yaoyao. Vibration and control of building drilling robot[J]. Journal of Mechanical & Electrical Engineering,2019,36(6):596−601. DOI: 10.3969/j.issn.1001-4551.2019.06.008
|
| [4] |
李旺年,张幼振,田宏亮,等. 基于煤岩可钻性的钻孔机器人自适应控制方法[J]. 工矿自动化,2023,49(6):182−188. DOI: 10.13272/j.issn.1671-251x.2022110047
LI Wangnian,ZHANG Youzhen,TIAN Hongliang,et al. Adaptive control method for drilling robot based on coal and rock drillability[J]. Journal of Mine Automation,2023,49(6):182−188. DOI: 10.13272/j.issn.1671-251x.2022110047
|
| [5] |
姚宁平,王毅,姚亚峰,等. 我国煤矿井下复杂地质条件下钻探技术与装备进展[J]. 煤田地质与勘探,2020,48(2):1−7. DOI: 10.3969/j.issn.1001-1986.2020.02.001
YAO Ningping,WANG Yi,YAO Yafeng,et al. Progress of drilling technologies and equipments for complicated geological conditions in underground coal mines in China[J]. Coal Geology & Exploration,2020,48(2):1−7. DOI: 10.3969/j.issn.1001-1986.2020.02.001
|
| [6] |
李泉新,刘飞,方俊,等. 我国煤矿井下智能化钻探技术装备发展与展望[J]. 煤田地质与勘探,2021,49(6):265−272.
LI Quanxin,LIU Fei,FANG Jun,et al. Development and prospect of intelligent drilling technology and equipment for underground coal mines in China[J]. Coal Geology & Exploration,2021,49(6):265−272.
|
| [7] |
杨林. 煤矿井下瓦斯抽采钻孔机器人研究现状及关键技术[J]. 煤矿机械,2018,39(8):60−62. DOI: 10.13436/j.mkjx.201808022
YANG Lin. Research status and key technology of underground gas drainage drilling robot in coal mine[J]. Coal Mine Machinery,2018,39(8):60−62. DOI: 10.13436/j.mkjx.201808022
|
| [8] |
吴榕,唐雯,林文祥. 减压阀动态性能仿真分析与测试[J]. 厦门大学学报(自然科学版),2011,50(5):847−851.
WU Rong,TANG Wen,LIN Wenxiang. Dynamic performance simulation of pressure relief valve and test[J]. Journal of Xiamen University (Natural Science),2011,50(5):847−851.
|
| [9] |
张怀亮,袁坚,邹伟. 基础振动下直动式减压阀动态特性分析[J]. 工程设计学报,2013,20(4):298−302. DOI: 10.3785/j.issn.1006-754X.2013.04.007
ZHANG Huailiang,YUAN Jian,ZOU Wei. The dynamic characteristics analysis of direct operated pressure reducing valve on fundamental vibration[J]. Chinese Journal of Engineering Design,2013,20(4):298−302. DOI: 10.3785/j.issn.1006-754X.2013.04.007
|
| [10] |
强彦,冯整顺,孙辉,等. 直动式比例减压阀功率放大器对其控制品质的影响[J]. 液压与气动,2022,46(11):34−41. DOI: 10.11832/j.issn.1000-4858.2022.11.005
QIANG Yan,FENG Zhengshun,SUN Hui,et al. Influence of direct acting proportional pressure reducing valve power amplifier on its control quality[J]. Chinese Hydraulics & Pneumatics,2022,46(11):34−41. DOI: 10.11832/j.issn.1000-4858.2022.11.005
|
| [11] |
杨华勇,王双,张斌,等. 数字液压阀及其阀控系统发展和展望[J]. 吉林大学学报(工学版),2016,46(5):1494−1505. DOI: 10.13229/j.cnki.jdxbgxb201605017
YANG Huayong,WANG Shuang,ZHANG Bin,et al. Development and prospect of digital hydraulic valve and valve control system[J]. Journal of Jilin University (Engineering and Technology Edition),2016,46(5):1494−1505. DOI: 10.13229/j.cnki.jdxbgxb201605017
|
| [12] |
卢文辉,李胜,吕敏健. 电液比例阀的结构原理与研究现状[J]. 机床与液压,2014,42(5):166−172. DOI: 10.3969/j.issn.1001-3881.2014.05.045
LU Wenhui,LI Sheng,LYU Minjian. Fundamental working principles of electro–hydraulic proportional valves and review on their development[J]. Machine Tool & Hydraulics,2014,42(5):166−172. DOI: 10.3969/j.issn.1001-3881.2014.05.045
|
| [13] |
GUO Yinan,CHENG Wei,GONG Dunwei,et al. Adaptively robust rotary speed control of an anchor–hole driller under varied surrounding rock environments[J]. Control Engineering Practice,2019,86(5):24−36.
|
| [14] |
赵超泽. 潜孔钻机推进与回转系统的仿真分析与研究[D]. 秦皇岛: 燕山大学, 2016.
ZHAO Chaoze. The analysis and simulation of DTH drill propulsion and rotary system[D]. Qinhuangdao: Yanshan University, 2016.
|
| [15] |
王东升,林宏武,赵宏强,等. 凿岩回转推进全液压自适应控制系统[J]. 液压与气动,2015(8):51−54. DOI: 10.11832/j.issn.1000-4858.2015.08.011
WANG Dongsheng,LIN Hongwu,ZHAO Hongqiang,et al. Total hydraulic auto adjusting system for rock drilling’s rotation and feed[J]. Chinese Hydraulics & Pneumatics,2015(8):51−54. DOI: 10.11832/j.issn.1000-4858.2015.08.011
|
| [16] |
KHALEEL A K A,ADNAN M S,ALHAMD S J. Estimation of Bourgoyne and Young model coefficients to predict optimum drilling rates and bit weights using genetic algorithms:A case study of the Faihaa oil field in Iraq[J]. IOP Conference Series:Materials Science and Engineering,2021,1067(1):012154. DOI: 10.1088/1757-899X/1067/1/012154
|
| [17] |
SHE Jinhua,MIYAMOTO K,HAN Qinglong. Generalized–extended–state–observer and equivalent–input–disturbance methods for active disturbance rejection:Deep observation and comparison[J]. IEEE/CAA Journal of Automatica Sinica,2023,10(4):957−968. DOI: 10.1109/JAS.2022.105929
|
| [18] |
鲁力群,王秀景,范钰涓,等. M4系列电液比例多路阀特性研究[J]. 机床与液压,2015,43(11):165−168. DOI: 10.3969/j.issn.1001-3881.2015.11.044
LU Liqun,WANG Xiujing,FAN Yujuan,et al. Characteristics research of electro−hydraulic proportional multi−way valve M4[J]. Machine Tool & Hydraulics,2015,43(11):165−168. DOI: 10.3969/j.issn.1001-3881.2015.11.044
|
| [19] |
姚亚峰. 全液压动力头式钻机给进系统的分析研究[D]. 西安: 西安科技大学, 2005.
YAO Yafeng. Analysis study on feeding system of all–hydraulic power head type drill rig[D]. Xi’an: Xi’an University of Science and Technology, 2005.
|
| [20] |
SHE Jinhua,FANG Mingxing,OHYAMA Y,et al. Improving disturbance rejection performance based on an equivalent input disturbance approach[J]. IEEE Transactions on Industrial Electronics,2008,55(1):380−389. DOI: 10.1109/TIE.2007.905976
|
| [21] |
YU Pan,LIU Kangzhi,SHE Jinhua,et al. Robust disturbance rejection for repetitive control systems with time–varying nonlinearities[J]. International Journal of Robust and Nonlinear Control,2019,29(5):1597−1612. DOI: 10.1002/rnc.4452
|
| [22] |
TIAN Shengnan,LIU Kangzhi,ZHANG Manli,et al. Disturbance rejection of T–S fuzzy systems:A membership function–dependent EID method[J]. International Journal of Systems Science,2023,54(3):618−632. DOI: 10.1080/00207721.2022.2135975
|
| [23] |
QIN A K,HUANG V L,SUGANTHAN P N. Differential evolution algorithm with strategy adaptation for global numerical optimization[J]. IEEE Transactions on Evolutionary Computation,2009,13(2):398−417. DOI: 10.1109/TEVC.2008.927706
|
Copyright of website design © Editorial Office of Coal Geology & Exploration 陕ICP备05001372号-6
 陕公网安备 61019002002193号
陕公网安备 61019002002193号
Address: Editorial Office of Coal Geology & Exploration, No.82 Jinye 1st Rd, High-Tech Zone, Xi'an City, Shaanxi, China
Tel: 029-81778075 E-mail: ccrimtdzykt@vip.163.com
Supported by: Beijing Renhe Information Technology Co., Ltd. 





 DownLoad:
DownLoad: