




A temporal fusion method for modeling the rate of penetration during deep geological drilling
-
摘要:目的
钻速是衡量钻进效率的关键指标,构建准确的钻速模型对于优化钻进过程、减少钻进成本具有重要意义。然而,深部地质钻进面临非线性、非凸优化、多工况及时序变化等挑战,传统建模方法难以适应复杂地质环境。
方法为解决上述难题,提出一种结合时序调节的钻速融合建模方法。首先,利用支持向量回归构建了钻速基础模型,用于解决钻速变化带来的非线性问题。接着,设计一种改进的蜣螂优化算法,通过权重融合、改进的回声定位、改进的局部迭代搜索与最佳解重更新策略,来解决模型参数设计面临的非凸优化问题。此外,采用基于模糊C均值聚类与Mann-Kendall趋势检验的时序调节方法,对模型输出进行时序调节,以适应钻速的时序变化。
结果和结论结果表明:(1)改进的蜣螂优化方法11个基准测试函数中展现出更好的效果,表明其能够有效解决模型参数设计问题。(2)基于实际钻进数据的仿真结果也说明了建立的钻速模型在两个井段中均取得了最佳的效果,时序调节后的模型在两个井段中的预测趋势正确率也分别提升到了80%和87.5%。(3)在微型钻进实验系统的测试中,建立的钻速模型在不同的岩石样本中均达到最高精度。建立的钻速模型能有效应对复杂的地质环境变化,为深部地质钻进过程控制奠定良好基础。
Abstract:ObjectiveGiven that the rate of penetration (ROP) serves as a key indicator of drilling efficiency, constructing an accurate ROP model holds great significance for optimizing drilling processes and reducing drilling costs. However, deep geological drilling faces challenges such as nonlinearity, non-convex optimization, multiple operating conditions, and temporal variations. Consequently, traditional modeling methods are difficult to adapt to complex geologic environments.
MethodsTo address these challenges, this study proposed a fusion method combined with temporal regulation for ROP modeling: the SVR-MDBO method. Initially, a basic ROP model was constructed using support vector regression (SVR) to solve the nonlinear problem caused by ROP changes. To solve the non-convex optimization problem encountered in model parameter design, a modified dung beetle optimizer (MDBO) algorithm was designed through weight fusion, modified echolocation, modified iterated local search, and the re-updating strategy of the optimal solution. To adapt to the temporal variations of the ROP, a temporal regulation method based on fuzzy C-means clustering and the Mann-Kendall trend test was employed to conduct the temporal regulation of the model output.
Results and ConclusionsThe results indicate that the MDBO algorithm yielded satisfactory results in the tests of 11 benchmark functions, suggesting that the MDBO algorithm can effectively solve the problem encountered in model parameter design. The simulation results based on actual drilling data demonstrate that the ROP model constructed in this study achieved optimal results in two well sections. Post-temporal regulation, the ROP model yielded more accurate predicted trends for both well sections, with respective prediction accuracy reaching up to 80% and 87.5%. The tests of the microdrilling experimental system reveal that the constructed ROP model yielded the highest accuracy under different rock samples. Overall, the constructed ROP model can effectively cope with changes in complex geologic environments, laying a solid foundation for controlling the process of deep geological drilling.
-
钻速是整个钻进系统反映钻进效率的关键指标,可靠的钻速模型能够为深部地质钻进过程控制提供重要基础。为降低钻进成本与时间,提升钻速已越来越成为关注的热点。在进行钻速调节前,需要构建精确且可靠的钻速模型作为调节的基础。
目前,针对钻速的建模方法主要分为两类,基于实际钻进数据的智能建模方法[1]与基于岩石力学方法的钻速机理模型[2]。岩石力学方法着眼于分析钻头与岩石的相互作用,通过揭示破岩过程中钻速的变化机理,进而构建钻速模型。例如考虑地层环境、钻头水力学、钻压等因素构建的钻速回归模型[3];以岩石动态强度反映破岩过程的室内钻速模型[4]。岩石力学方法需要根据钻头类型来构建钻速模型,且部分参数在深部地质钻进中较难获取,进而限制了岩石力学方法的适用性。此外,岩石力学方法可以分析单一地层环境中钻速的变化,但对于井下复杂固体−液体−气体的非线性变化环境[5-6],岩石力学方法难以满足钻速的建模需求。
为准确描述复杂地质钻进过程的钻速变化,一些基于神经网络与支持向量回归的智能建模方法被引入,它们不需要分析复杂岩石力学变化,通过实际钻进数据来建立有效的钻速模型,进而为后续的优化与控制提供良好基础[7-8]。学者们将超限学习机与增量学习进行融合,取得了较好的预测效果与泛化能力[9]。也有学者将最小二乘支持向量回归与人工神经网络方法进行对比,结果表明基于最小二乘支持向量回归的建模方法具有更高的精度[10]。支持向量回归方法相对其他方法具有更好的非线性拟合能力,同时在面对地质钻进过程不同地层的小样本的钻进时,依然存在良好效果。
深部地质钻探的复杂非线性导致模型的参数存在高维度变化,促使学者引入粒子群优化[11]、遗传算法[12]与蝙蝠算法[13]等优化算法来优选模型参数,以提升模型精度。例如通过粒子群优化算法、遗传算法与帝国竞争算法等方法来确定人工神经网络参数值[14];将遗传算法、布谷鸟优化算法与粒子群优化算法分别与最小二乘支持向量回归模型结合[15];设计一种改进的蝙蝠算法来确定支持向量回归方法的模型参数最佳值,取得了较好的效果[16]。
尽管上述方法在一定程度上已经考虑了钻速建模的非线性与模型参数设计问题,但在应对模型参数高维度变化时仍存在局限性,需要设计合适的全局优化方法来设计最佳的模型参数值。在地质钻进过程中,钻速还存在时序变化特性[17],钻速模型需要在拟合钻速非线性变化的同时跟随其时序变化特性。此外,不同的钻遇地层导致钻进数据的差异性明显,需要对数据进行划分,并基于划分结果,构建钻速融合模型来保证模型的精度。
为解决上述问题, 设计了一种针对复杂地质环境的钻速建模方法,以解决钻速建模过程中面临的非线性,时序性,模型参数的高维度变化,以及多工况问题。首先,采用支持向量回归方法,解决钻速建模的非线性问题。进一步,设计一种新的蜣螂优化算法,以解决模型参数的高维度变化导致的非凸优化问题。最终,引入模糊C均值聚类与趋势检验方法,解决时序与多工况问题。
1 深部地质钻进特征与钻速模型结构
深部地质钻进过程因其面临的复杂环境,需要在建模前进行特征分析,为后续的模型结构奠定基础。
1.1 深部地质钻进过程特征分析
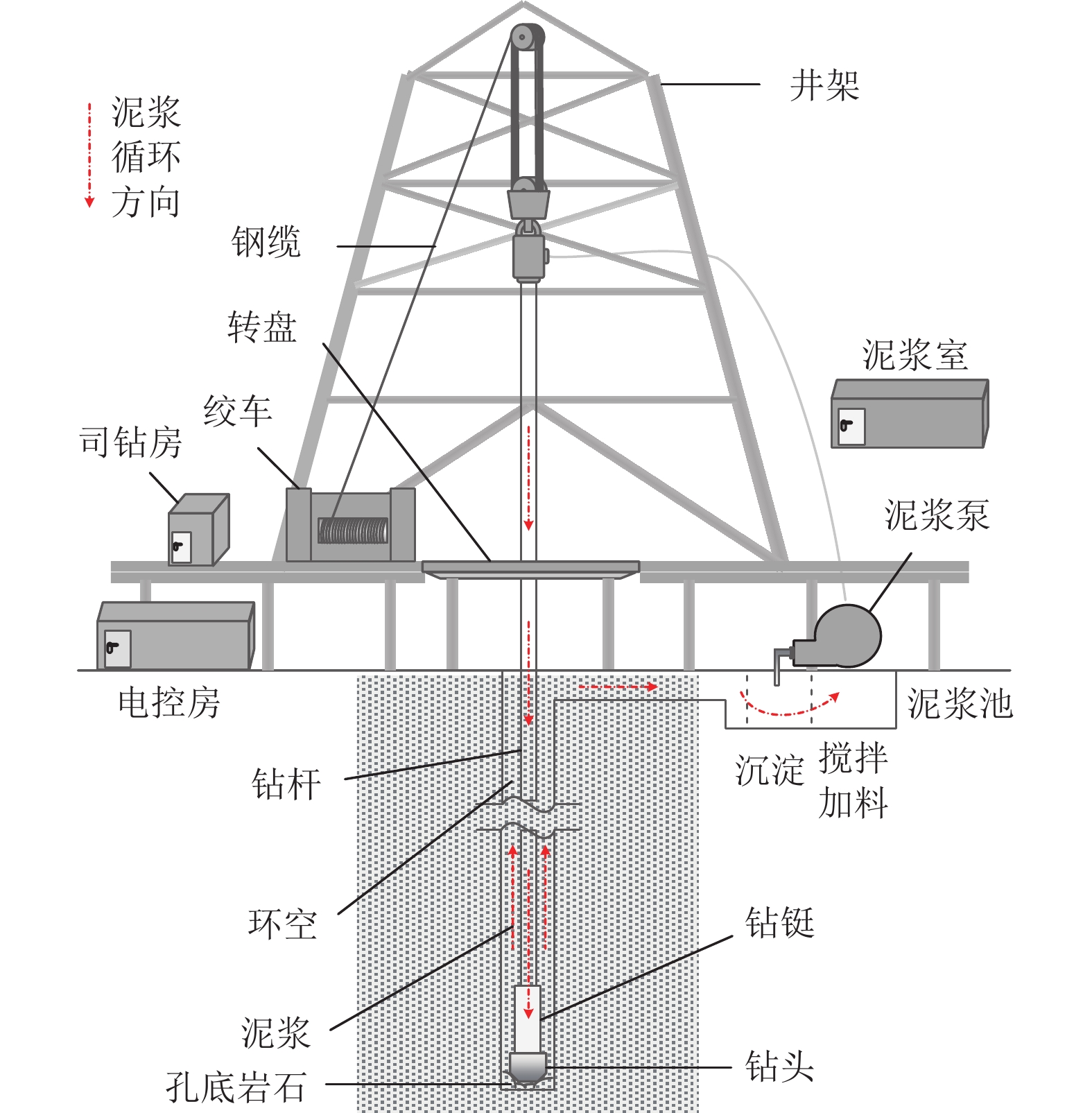
深部地质钻进系统如图1所示,按功能划分为钻井液循环系统与钻柱回转给进系统。钻井液循环系统通过泥浆泵将钻井液压入至钻杆,从钻头水眼处喷出,并通过环空返回地面,最终在泥浆池中进行沉淀与搅拌加料等操作进行循环利用。在钻井液循环过程中,钻井液起到平衡破碎与重构后的地层压力,冲刷底部岩石作用。钻柱回转给进系统则通过井架与绞车支撑数千米长的钻柱,同时通过转盘带动钻柱进行旋转破岩。钻柱由质量较轻的钻杆和质量与刚度较大的钻铤构成。井架的司钻房与地面上的司钻房通过电控系统驱动与控制泥浆泵、天车与转盘等,进行钻进过程的操作与调节。在深部地质钻进过程中,钻速是反映钻进过程效率的重要指标。如何构建有效的钻速模型,准确分析钻速变化,是调节钻速,降低非钻进时间,节约钻进成本的关键基础。
深部地质钻进过程的钻速变化主要包括时序性、多工况与非线性,具体如下。
(1)时序性:当钻头穿越复杂混合岩层时,钻速变化会呈现一定的时序特性,需要引入合适的方法对钻速模型的输出进行时序调节。
(2)多工况:井下钻遇地层复杂,工程师进行钻进操作时,可能会针对不同的地层进行合适的偏好操作,这些偏好操作给钻进过程带来不同的工况。这些工况案例可以给钻速变化的时序调节提供调节依据。
(3)非线性:在井下破岩过程中,井下岩石、钻井液和钻头间的复杂作用,使得钻速的变化呈现出复杂的非线性,这些复杂的非线性进一步导致基于实际数据的钻速模型参数呈现高维度变化,需要合适的优化算法来解决模型参数设计的问题。
1.2 钻速模型结构
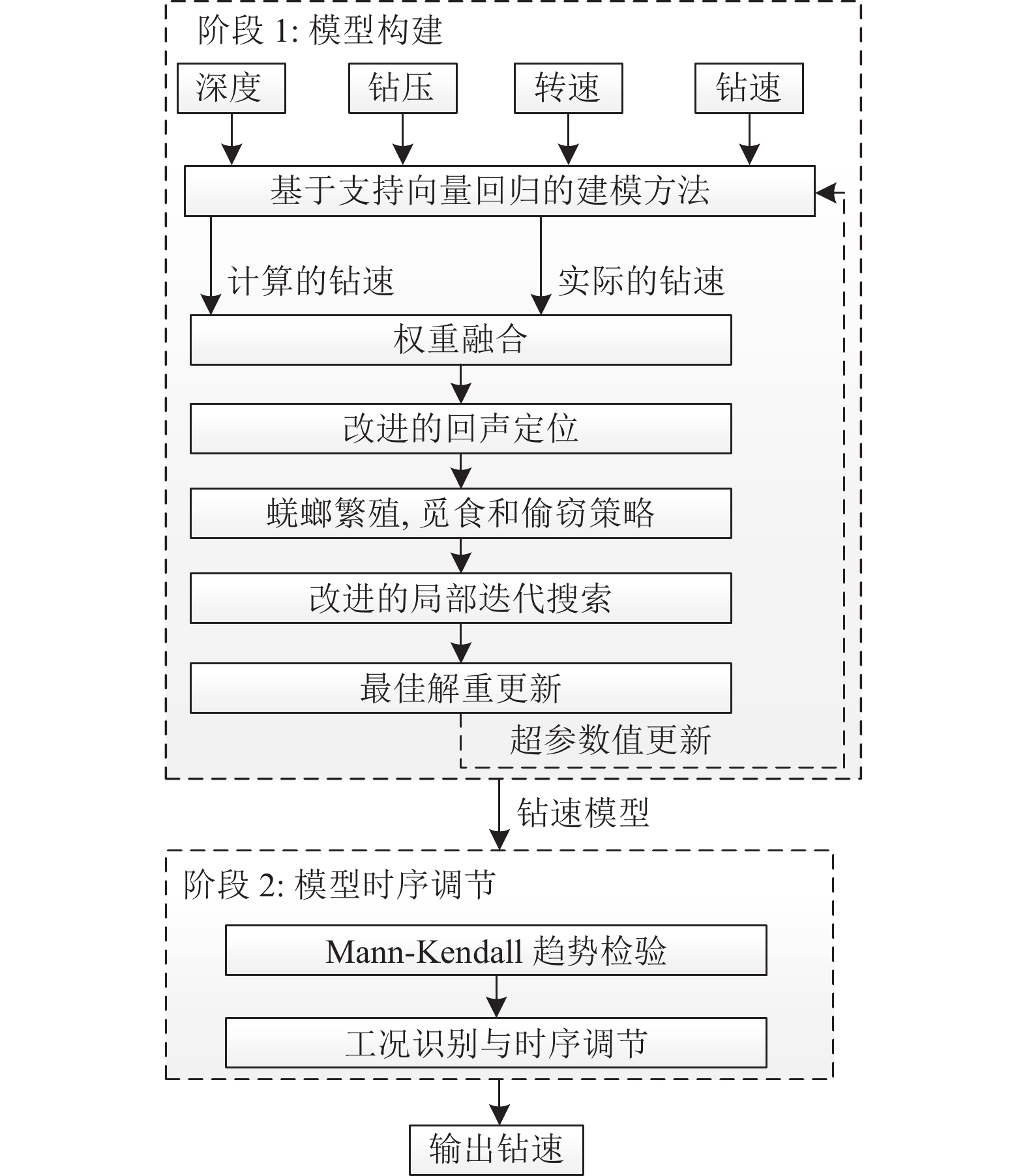
为满足以上建模需求,设计了一种新的钻速建模方法,如图2所示。
钻速模型的构建主要包括2个阶段,钻速模型的构建和模型时序调节。在模型构建阶段,首先采用支持向量回归方法构建钻速模型,进一步,设计一种改进的蜣螂优化算法(modified dung beetle optimizer,MDBO),来设计支持向量回归模型的参数值。在模型调节阶段,首先采用趋势检验方法对当前钻速的变化进行分析,然后采用模糊C均值聚类方法,对钻进过程的工况进行分类,进一步基于分类与趋势分析结果,对钻速模型的输出进行时序调节,实现钻速变化的准确预测。
设计了改进的蜣螂优化算法以确定模型最佳参数值。改进的蜣螂优化算法引入权重融合、改进的局部搜索、改进的回声定位及最佳解的重更新机制,来解决参数高维度变化带来的非凸优化问题。在建模过程中,将构建模型的数据中任意选择10%的数据作为验证集,然后将剩余90%用于训练模型,在训练模型过程中,采用改进的蜣螂优化算法不断更新支持向量回归模型的超参数让训练的模型在验证集中具有最高的精度,来获得超参数的最佳值。
2 钻速模型与参数设计
为解决建模面临的非线性与高维度问题,本节采用改进蜣螂优化算法与支持向量回归构建钻速模型。
支持向量回归方法以其良好非线性回归的性能,被广泛应用于冶金与钻井等复杂工业过程[5,18]。存在$ N $组输入输出数据$ \left( {{x_i},{y_i}} \right) $,用于建立模型。在支持向量回归模型中,超参数惩罚因子$ {C_{{\mathrm{pf}}}} $与核函数带宽$ \sigma $影响钻速模型精度。为确定最佳的模型参数值,本节以验证集的均方误差为训练目标,具体如下:
$$ F = \frac{1}{n}\sum\limits_{i = 1}^n {{{\left( {g\left( {{C_{{\mathrm{pf}}}},\sigma } \right) - {y_i}} \right)}^2}} $$ (1) 基于支持向量回归的超参数的确定是一个非凸优化问题,为解决这一问题,本节设计了一种新的改进蜣螂优化算法,来确定最佳的操作参数值。
改进的蜣螂优化算法融合标准蜣螂优化算法(dung beetle optimizer,DBO)[19]、改进蝙蝠算法(modified bat algorithm,MBA)[16]和混合蝙蝠算法(hybrid bat algorithm,HBA)的优势[20],在已有的繁殖、觅食与偷窃策略的基础上,设计权重融合、改进的回声定位、改进的局部迭代搜索与最佳解重更新等策略,以提升全局搜索能力。改进具体如下:
1)权重融合策略
权重融合策略通过融合随机权重与自适应权重的优势来保证优化算法在迭代过程中的搜索能力,其中随机权重可提升算法跳出局部最优的可能性,随机权重具体如下:
$$ {\omega _{{\mathrm{sj}}}} = {\tau _{{\mathrm{l}}}} + R\left( {{\tau _{{\mathrm{u}}}} - {\tau _{{\mathrm{l}}}}} \right) + \varsigma {R_{\mathrm{n}}} $$ (2) 在迭代初期和末期需要对全局与局部搜索进行平衡,因而引入自适应权重来进行平衡,具体如下:
$$ {\omega _{{\text{zsy}}}} = 0.6\cos \left( {\left( {{\pi \mathord{\left/ {\vphantom {\pi 2}} \right. } 2}} \right)\left( {1 - {t \mathord{\left/ {\vphantom {t M}} \right. } M}} \right)} \right) $$ (3) 进一步,得到的融合权重如下:
$$ \bar \omega = {{\left( {{\omega _{{\mathrm{sj}}}} + {\omega _{{\text{zsy}}}}} \right)} / 2} $$ (4) 将自适应权重与随机融合,有效平衡算法的全局与局部搜索能力,并提升算法跳出局部最优的可能性。
2)改进的回声定位策略
回声定位策略调节搜索个体的速度与方向来提升算法的全局搜索能力,为进一步增加蜣螂个体在搜索方向与速度的多样性,引入随机因子,设计改进的回声定位策略,当前个体适应度函数值大于个体局部最优时,即$ f\left( {X_i^t} \right) > f\left( {X_{ic}^t} \right) $时:
$$ V_i^t = \bar \omega V_i^{t-1} + {v_1}R\left( {X_{ic}^t - X_i^t} \right) + {v_2}R\left( {{X_ * } - X_i^t} \right) $$ (5) 当$ f\left( {X_i^t} \right) \leqslant f\left( {X_{ic}^t} \right) $时,
$$ V_i^t = \bar \omega V_i^{t-1} + {v_2}R\left( {{X_ * } - X_i^t} \right) $$ (6) 进一步,蜣螂的位置更新如下:
$$ X_i^t = X_i^{t - 1} + V_i^t $$ (7) 改进的回声定位通过增强搜索方向以提升蜣螂种群的全局搜索能力。
3)改进的局部迭代搜索
基于局部迭代搜索,引入扰动机制,增加其在次优解周边搜索的可能性,进而提升其全局搜索能力。在每轮迭代过程对最优解施加一个扰动,具体如下:
$$ X_{i * }^{{\mathrm{iter}}} = {X_ * } + 0.02{R_{\mathrm{n}}}{X_ * } $$ (8) 当施加一个小的扰动后,如果$ f\left( {X_{i * }^{{\mathrm{iter}}}} \right) < f\left( {{X_ * }} \right) $,则接受这个新生成的全局最优解;或者当$ \exp \left( - \left( f\left( {X_ * ^{{\mathrm{iter}}}} \right) - f\left( {{X_ * }} \right) \right) \right) > R $,也接受新生成的解,使其具有在次优解周边搜索的能力。
4)最佳解重更新
当迭代到最大迭代次数的90%时,对全局最优解进行扰动,以避免在迭代末期陷入了局部最优,施加的扰动如下:
$$ X_ * ^{{\mathrm{up}}} = {X_ * } + {v_1}R\left( {{X_ * } - b_{\mathrm{l}}} \right) + {v_2}\left( {{X_ * } - b_{\mathrm{u}}} \right) $$ (9) $ {v_1} $和$ {v_2} $的计算如下:
$$ \begin{aligned} & {v_1} = 2 - 2{{\left( {t - M} \right)} \mathord{\left/ {\vphantom {{\left( {t - M} \right)} {\left( {1 - M} \right)}}} \right. } {\left( {1 - M} \right)}} \\ & {v_2} = 0.5 + 2{{\left( {t - M} \right)} \mathord{\left/ {\vphantom {{\left( {t - M} \right)} {\left( {1 - M} \right)}}} \right. } {\left( {1 - M} \right)}} \end{aligned} $$ (10) 基于前4个方面的改进,结合标准的蜣螂优化算法的繁殖、觅食和偷窃策略[19],一种改进的蜣螂优化算法被设计,用于优选最佳的模型参数值,算法的伪代码具体如下:
算法1 一种改进的蜣螂优化算法(MDBO) Input: 蜣螂种群$ {R_t} $,最大迭代次数$ M $,种群数量$ N $。
Output: 最佳解$ {X_ * } $及适应度$ f\left( {{X_ * }} \right) $。
1: 初始化蜣螂种群$ {X_i} = b_{\mathrm{l}} + \left( {b_{\mathrm{u}} - b_{\mathrm{l}}} \right) \cdot {\mathrm{rand}}\left( {1,d} \right) $,满足$ b_{\mathrm{l}} \leqslant {X_i} \leqslant b_{\mathrm{u}} $,初始化适应度函数值$ f\left( {{X_i}} \right) $。
2: for $ t = 1,2,\cdots ,M $do
3: for $ 1 \leqslant i \leqslant {n_1} $
4: 采用式(2)—式(4)的权重融合策略更新权重,基于式(7)更新蜣螂位置
5: End for
6: for $ {n_1} < i \leqslant {n_2} $
7: 基于繁殖策略,更新蜣螂位置。
8: End for
9: For $ {n_2} < i \leqslant {n_3} $
10: 基于觅食策略,更新蜣螂位置。
11: End for
12: For $ {n_3} < i \leqslant N $
13: 基于偷窃策略,更新蜣螂位置。
14: End for
15: 执行改进的局部迭代搜索。
16: if $ t > \eta M $ then
17: 采用式(9)更新种群中的最优蜣螂。
18: end if
19: end for
20: 输出最优解$ {X_ * } $及$ f\left( {{X_ * }} \right) $,并终止优化算法。3 时序调节策略
在地质钻进深度逐渐加大时,由于岩性的变化,钻速变化在局部范围内呈现上升或下降趋势,采用基于支持向量回归的钻速模型,虽然可以解决钻速变化带来的非线性问题与非凸优化问题,但在应对时序变化方面依然存在不足,因而需要对钻速的时序变化趋势进行分析,并基于趋势分析结果对钻速的时序输出进行调节。
3.1 趋势检验分析与显著性判断
本节中采用Mann-Kendall(M-K)趋势检验法,确定钻速变化的趋势与趋势显著性。M-K趋势检验分析法,被广泛应用于数据的趋势分析中[21]。
在M-K检验中,设置假设$ {H_0} $中时间序列$ Z = \left( {{\textit{z}}_1}, {{\textit{z}}_2},\cdots ,{{\textit{z}}_n} \right) $不存在一定的上升或下降趋势。另一备选假设$ {H_\alpha} $,序列$ Z = \left( {{{\textit{z}}_1},{{\textit{z}}_2},\cdots ,{{\textit{z}}_n}} \right) $存在上升或者下降趋势。对于序列$ Z = \left( {{{\textit{z}}_1},{{\textit{z}}_2},\cdots ,{{\textit{z}}_n}} \right) $,其M-K检验的统计量$ S $计算如下:
$$ S = \sum\limits_{k = 1}^{n - 1} {\sum\limits_{j = k + 1}^n {{{\mathrm{sgn}}} \left( {{{\textit{z}}_j} - {{\textit{z}}_k}} \right)} } $$ (11) 如果$ S > 0 $,那么后面的观测值相比之前的观测值倾向于更大,反之,则后面的观测值相比之前的观测值倾向于更小。
进一步对时间序列$ Z $的变化进行显著性分析,将$ S $转化为检验统计量$ {Z_{{\mathrm{MK}}}} $计算如下:
$$ {Z}_{{\mathrm{MK}}}=\left\{\begin{aligned} &\frac{S-1}{\sqrt{V\left(S\right)}}\;\;,\quad 如果S > 0\\ &0,\qquad\qquad \;\; 如果S=0\\ &\frac{S+1}{\sqrt{V\left(S\right)}}\;\;,\quad 如果S < 0\end{aligned}\right. $$ (12) 进一步,在显著性水平$ \alpha $下,判断是否接受$ {H_0} $的替代假设$ {H_\alpha } $。当$ \left| {{Z_{{\mathrm{MK}}}}} \right| \geqslant {Z_{1 - {\alpha \mathord{\left/ {\vphantom {\alpha 2}} \right. } 2}}} $时,则拒绝零假设$ {H_0} $,接受替代假设$ {H_\alpha } $,即$ \left| {{Z_{{\mathrm{MK}}}}} \right| \geqslant {Z_{1 - {\alpha \mathord{\left/ {\vphantom {\alpha 2}} \right. } 2}}} $时,时间序列$ Z $存在一定的上升或者下降趋势。进一步,根据式(11)计算得到的$ S $,判断时间序列是显著向上或向下发展。
通过趋势变化因子,实现对基于支持向量回归与蜣螂优化算法模型输出调节,趋势变化因子计算如下:
$$ \beta = {\mathrm{Median}}\left( {\frac{{{{\textit{z}}_j} - {{\textit{z}}_k}}}{{j - k}}} \right) $$ (13) 3.2 钻进过程工况识别与时序调节
钻进过程因其操作工艺与地层环境,使得钻进过程呈现出多种不同的工况,对工况的有效识别,能为钻进过程的模型的时序调节提供有效信息。模糊C均值(fuzzy C-means,FCM)聚类方法能够通过分析数据间的差异来实现[22]。
在基于FCM进行钻进过程的工况划分时,需要预先给出聚类数量。然后由于地层环境的复杂性与探测的滞后性,最佳的聚类数量一般难以 预先给出。轮廓系数法根据数据样本在聚类簇内与簇间的差异,来确定聚类数量,取得了良好的聚类划分效果[23]。轮廓系数法根据钻进数据的全局轮廓系数,判断最佳的聚类数量。钻进数据的全局轮廓系数计算如下:
$$ s = \frac{1}{{{N_{{\mathrm{sc}}}}}}\sum\limits_{i = 1}^{N_{{\mathrm{sc}}}} {s\left( i \right)} $$ (14) $ s\left( i \right) $的计算如下:
$$ s\left( i \right) = \frac{{O\left( i \right) - I\left( i \right)}}{{\max \left\{ {O\left( i \right),I\left( i \right)} \right\}}} $$ (15) 全局轮廓系数$ s $越接近1时,聚类效果越好,因而选取$ s $接近1时的结果作为最佳聚类数量。
基于聚类结果与M-K趋势检验分析结果。时序调节的过程如下:
步骤1:基于M-K趋势检验法,确定当前钻速变化 趋势。
步骤2: 计算需要时序调节的样本$ t_{\mathrm{e}} $到聚类中心的距离。
$$ {d_i} = \left\| {{c_j} - t_{\mathrm{e}}} \right\| $$ (16) 基于最小的$ {d_i} $值确定需要调节的样本所属类别。
步骤3:计算$ t_{\mathrm{e}} $与所属类别中所有样本$ {S_i} $的距离。
$$ {d_{{\mathrm{o}}i}} = \left\| {t_{\mathrm{e}} - {S_i}} \right\| $$ (17) 步骤4:在距离最近的前30%样本中,选取钻速比$ t_{\mathrm{e}} $钻速大或者小的样本。
步骤5:根据M-K检验分析中得到的趋势结果与工况识别结果,得到钻速的4种时序调节方式,见表1。在表1中,$ {v_{{\mathrm{rop}}}} $为模型的预测值,$ \beta $为M-K趋势检验得到的上升(或者下降)因子,$ {\bar v_{{\mathrm{u}}}} $(或$ {\bar v_{{\mathrm{d}}}} $)为选取的数据样本中,钻速比当前钻速大或者小的均值。
表 1 4种情况的调节方式Table 1. Four temporal regulation methods方式 是否显著 变化趋势 调节方式 1 是 上升 $ \max \left( {{v_\text{rop}} + \beta ,{v_\text{rop}} + \left( {{{\bar v}_\text{up}} - {v_\text{rop}}} \right)} \right) $ 2 否 上升 $ \min \left( {{v_\text{rop}} + \beta ,{v_\text{rop}} + \left( {{{\bar v}_\text{up}} - {v_\text{rop}}} \right)} \right) $ 3 是 下降 $ \min \left( {{v_\text{rop}} - \left| \beta \right|,{v_\text{rop}} - \left| {{{\bar v}_\text{down}} - {v_\text{rop}}} \right|} \right) $ 4 否 下降 $ \max \left( {{v_\text{rop}} - \left| \beta \right|,{v_\text{rop}} - \left| {{{\bar v}_\text{down}} - {v_\text{rop}}} \right|} \right) $ 整个调节过程,主要分为两个阶段,第一阶段为步骤1到步骤3,用于判断当前状态下钻速的变化方向与所属类别。第二阶段为步骤4到步骤5,通过设计合适的调节策略,对模型的输出进行调节。通过对模型的趋势分析与时序调节,能够有效给出当前钻速的变化趋势,并调节模型输出,有效保障钻速建模精度与可靠性。
4 实验验证与分析
利用湖北襄阳某地热井实钻数据与微型钻进实验系统对所提建模方法进行验证分析。襄阳地热井包含白云岩、炭质页岩、条带状灰岩等多种不同岩层,能够有效测试模型的性能。从襄阳地热井中选择两个井段各740组数据进行分析,对于各个井段,其中700组数据用于构建模型,余下40组数据来测试建模效果。700组数据进一步划分为训练集和验证集,其中630组数据用于建立模型,70组数据作为验证集,训练集中的数据也被用于聚类分析,在每组测试集数据中,还收集对应的50组钻速时序数据,用于趋势分析。
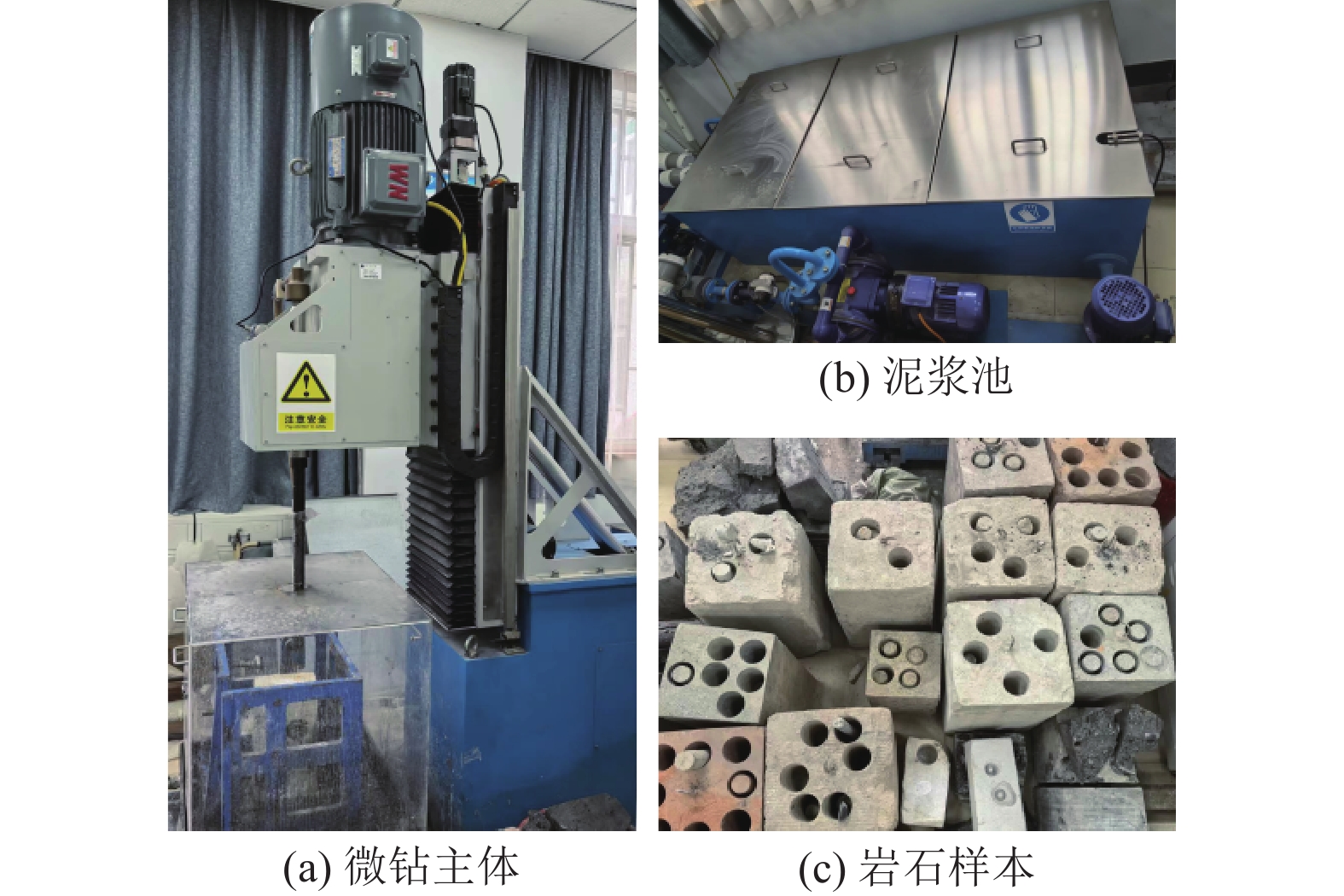
为进一步验证所提方法的有效性,采用如图3所示的微型钻进实验系统对所提建模方法进行验证。微型钻进系统是根据实际破岩与循环机制,建立的室内微型钻进实验系统,主要包含钻柱回转给进系统与循环系统。在进行钻进实验时,通过更换多种不同的岩石样本来模拟不同的地层。
4.1 优化算法性能分析
在分析建模效果前,首先评估设计的改进蜣螂优化算法的性能。为有效评价改进蜣螂优化算法的效果,采用2017年电气与电子工程师学会进化计算大会(Institute of electrical and electronics engineers congress on evolutionary computation 2017,IEEE CEC2017)基准函数来验证与对比所提方法的性能,对比结果见表2,第2列为MDBO的结果,第3列到第5列为文献[19]中的结果,对比的3种算法分别为蜣螂优化算法(DBO),灰狼优化算法(grey wolf optimizer,GWO)和粒子群优化算法(particle swarm optimization,PSO)。在表2中,F01为第一个测试函数,共有29个测试函数。IEEE CEC2017基准函数具有大量局部最优解、次优解远离最优解、局部最优解周边具有特征等特点,也被用于进行标准蜣螂优化算法性能的评价。在进行对比实验中,IEEE CEC2017的测试函数中,决策变化的范围为[−100,100],种群数量为30,迭代次数为10 000,算法在每个基准测试函数独立运行30次。
表 2 4种优化算法的IEEE CEC2017基准函数测试结果Table 2. Test results of IEEE CEC2017 benchmark functions for four optimization algorithms编号 MDBO DBO GWO PSO F01 2.72×102 3.15×103 1.05×106 1.81×103 F03 3.00×102 3.00×102 5.47×102 3.00×102 F04 4.00×102 4.01×102 4.13×102 4.01×102 F05 5.26×102 5.29×102 5.13×102 5.36×102 F06 6.05×102 6.04×102 6.00×102 6.06×102 F07 7.34×102 7.38×102 7.27×102 7.18×102 F08 8.18×102 8.20×102 8.12×102 8.23×102 F09 9.22×102 9.21×102 9.24×102 9.00×102 F10 1.67×103 1.77×103 1.42×103 1.88×103 F11 1.13×103 1.14×103 1.13×103 1.12×103 F12 1.18×104 2.17×105 3.91×105 1.27×104 F13 1.84×103 7.37×103 7.52×103 7.74×103 F14 1.48×103 1.47×103 1.69×103 1.45×103 F15 1.59×103 1.63×103 2.07×103 1.55×103 F16 1.74×103 1.70×103 1.69×103 1.86×103 F17 1.75×103 1.74×103 1.75×103 1.76×103 F18 1.97×103 1.07×104 2.27×104 4.39×103 F19 1.96×103 1.99×103 3.83×103 2.11×103 F20 2.08×103 2.05×103 2.07×103 2.12×103 F21 2.21×103 2.20×103 2.31×103 2.31×103 F22 2.31×103 2.29×103 2.30×103 2.38×103 F23 2.64×103 2.62×103 2.61×103 2.70×103 F24 2.53×103 2.58×103 2.74×103 2.80×103 F25 2.92×103 2.91×103 2.94×103 2.92×103 F26 2.94×103 2.98×103 3.14×103 3.30×103 F27 3.10×103 3.09×103 3.09×103 3.14×103 F28 3.14×103 3.25×103 3.36×103 3.16×103 F29 3.23×103 3.18×103 3.17×103 3.24×103 F30 4.34×103 3.29×105 5.34×105 5.27×103 计数 11 7 8 6 在表2中,相对于其他算法,MDBO算法在11个基准函数上排名第一,包括F01,F03,F04,F12,F13,F18,F19,F24,F26,F28,F30,这些函数具有多模态、大量局部最优解、局部最优解周边具有不同特征等特点。在这些函数上具有最佳的结果,表明MDBO在解决非凸优化问题上具有良好的性能,并能有效确定最佳的模型参数值。
4.2 钻速建模仿真结果分析
为验证提出的方法的有效性,采用k折交叉验证的支持向量回归(SVR)方法以及融合蝙蝠算法(BA)和支持向量回归(SVR-BA)的建模方法进行对比。2组实验的模型参数,$ k $折交叉验证的折数为10,200和100分别为种群数量N与迭代次数M。SVR-MDBO是融合改进的蜣螂优化算法(MDBO)的钻速模型。
基于实际数据的钻进建模结果如图4所示,其中N1为SVR-MDBO时序调节后的建模效果。
在图4a对应的井段1中,提出的建模方法SVR-MDBO的差值范围为[−
0.2546 ,0.2750 ],在图4b对应的井段2中,SVR-MDBO的差值范围为[−0.2338 ,0.2648 ],相对于其他建模方法,SVR-MDBO方法构建的钻速模型具有更小的差值区间,说明其具有更高的精度。为进一步评估建模结果,采用均方根误差(root mean square error,RMSE),平均绝对误差(mean absolute difference,MAD),最大绝对误差(maximum absolute error,MAE)和差值范围(error distribution,$ {e_{\mathrm{d}}} $)来评估建模效果。
钻速预测模型的评估结果见表3,其中第2到5行为井段1评估结果,第6到9行为井段2评估结果。对于其他建模方法均展现出最好的性能,这说明所提方法能够适应深部复杂地层环境,在不同的地层环境下均具有良好的效果。
表 3 钻速模型的评估结果Table 3. Assessment results of the ROP models井段 预测模型 RMSE MAD MAE $ {e_{\mathrm{d}}} $ 井段1 SVR 0.2602 0.2274 0.4169 [− 0.4169 ,0.4160 ]SVR-BA 0.2205 0.1873 0.3907 [− 0.3770 ,0.3907 ]SVR-MDBO 0.1651 0.1449 0.2750 [− 0.2546 ,0.2750 ]N1 0.2020 0.1717 0.3962 [− 0.3676 ,0.3962 ]井段2 SVR 0.2282 0.1939 0.4113 [− 0.4113 ,0.3579 ]SVR-BA 0.1856 0.1578 0.3068 [− 0.3068 ,0.2822 ]SVR-MDBO 0.1492 0.1288 0.2648 [− 0.2338 ,0.2648 ]N1 0.1547 0.1294 0.3448 [− 0.2914 ,0.3448 ]为分析时序调节的结果,引入趋势预测准确率$ T $来进行分析,趋势预测准确率定义为:
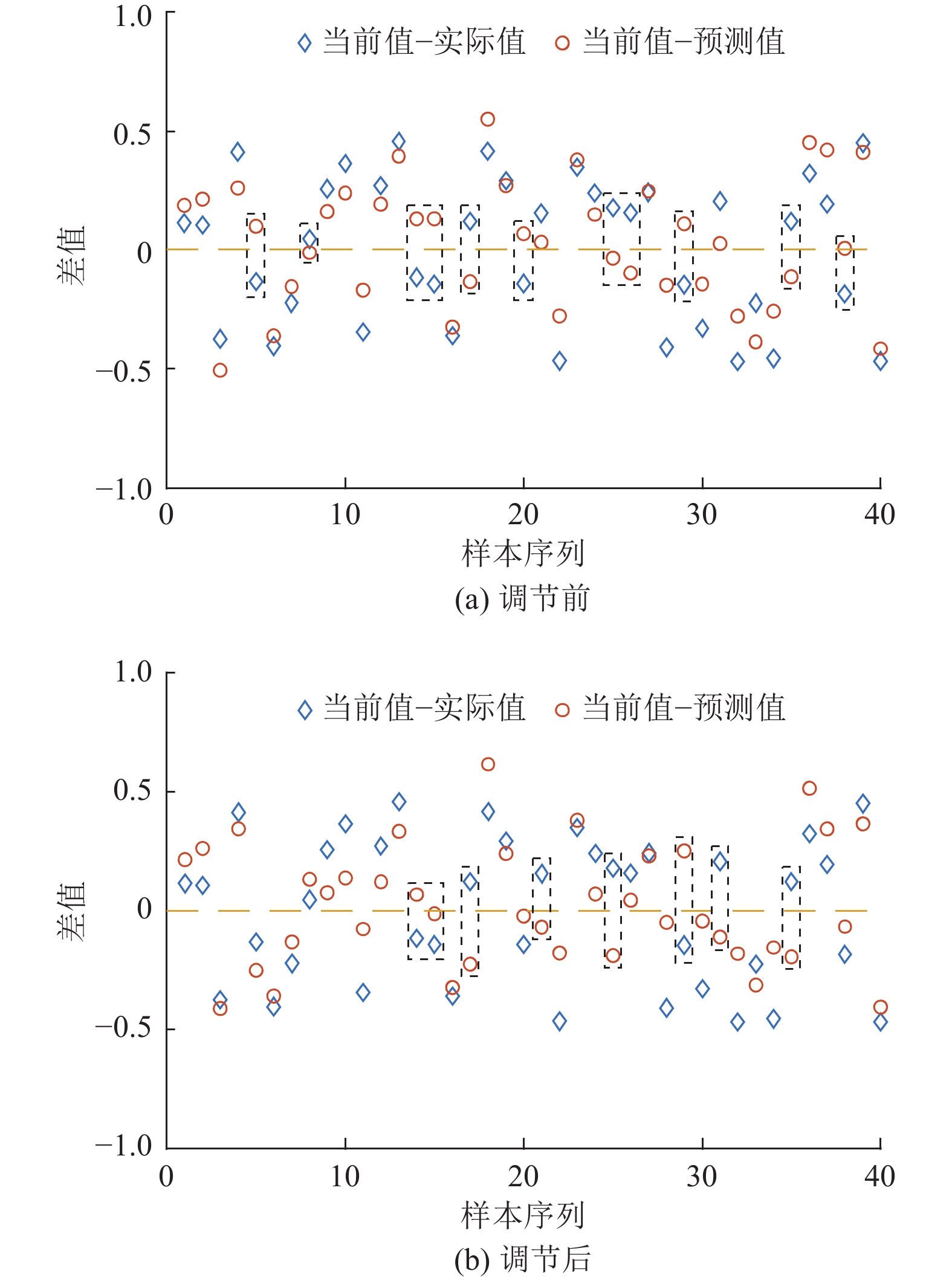
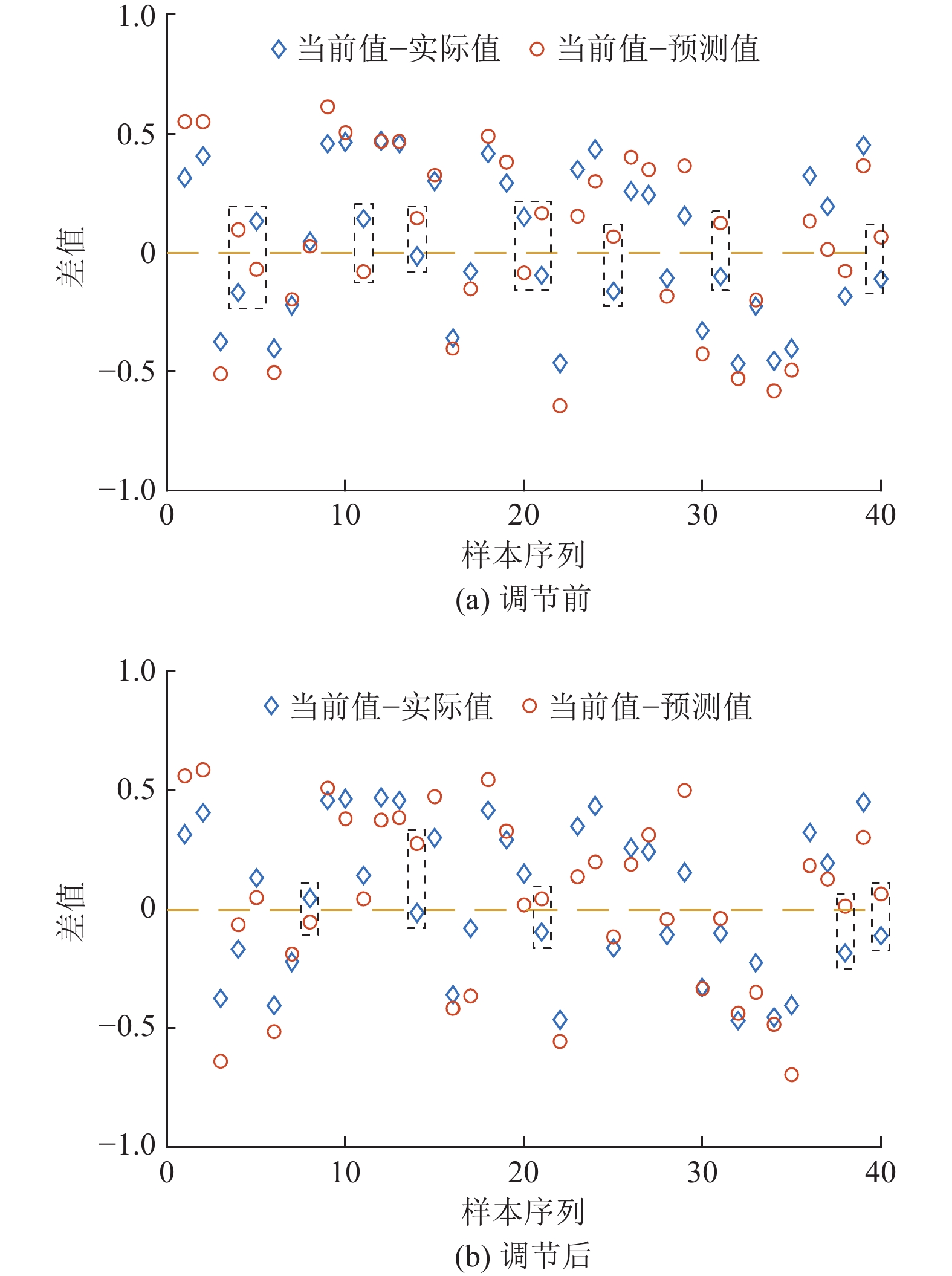
$$ T = \left( {{{{N_{\mathrm{c}}}} /{{N_{\mathrm{r}}}}}} \right) \times 100\text{%} $$ (18) 图5和图6为预测趋势对比,其中,当前值和实际值分别为模型输入端与输出端的钻速测量值,预测值为SVR-MDBO(调节前)或模型N1(调节后)输出结果。当预测趋势正确时候,图中菱形与圆圈会在虚线同一侧,黑色虚线框中的样本为预测趋势错误的样本。
在井段1和井段2中,时序调节前,SVR-MDBO的预测趋势正确率分别为72.5%和77.5%,调节后的预测趋势正确率为80%和87.5%。实验结果表明,经过基于工况识别与M-K趋势检验的时序调节后的模型能够更好地跟随钻速的时序变化。
钻进数据的仿真结果表明,提出的SVR-MDBO钻速模型能够在不同的地层环境下均取得良好的建模效果,经过时序调节后的模型N1,虽然在钻速建模精度上效果稍弱于SVR-MDBO,但能够更加精确跟随钻速的时序变化,且其建模精度也强于其他钻速建模方法,说明所提出的建模方法在解决钻速建模非线性、多工况、模型参数高维度变化及钻速时序变化问题等方面具有良好性能。
4.3 基于实验系统的结果分析
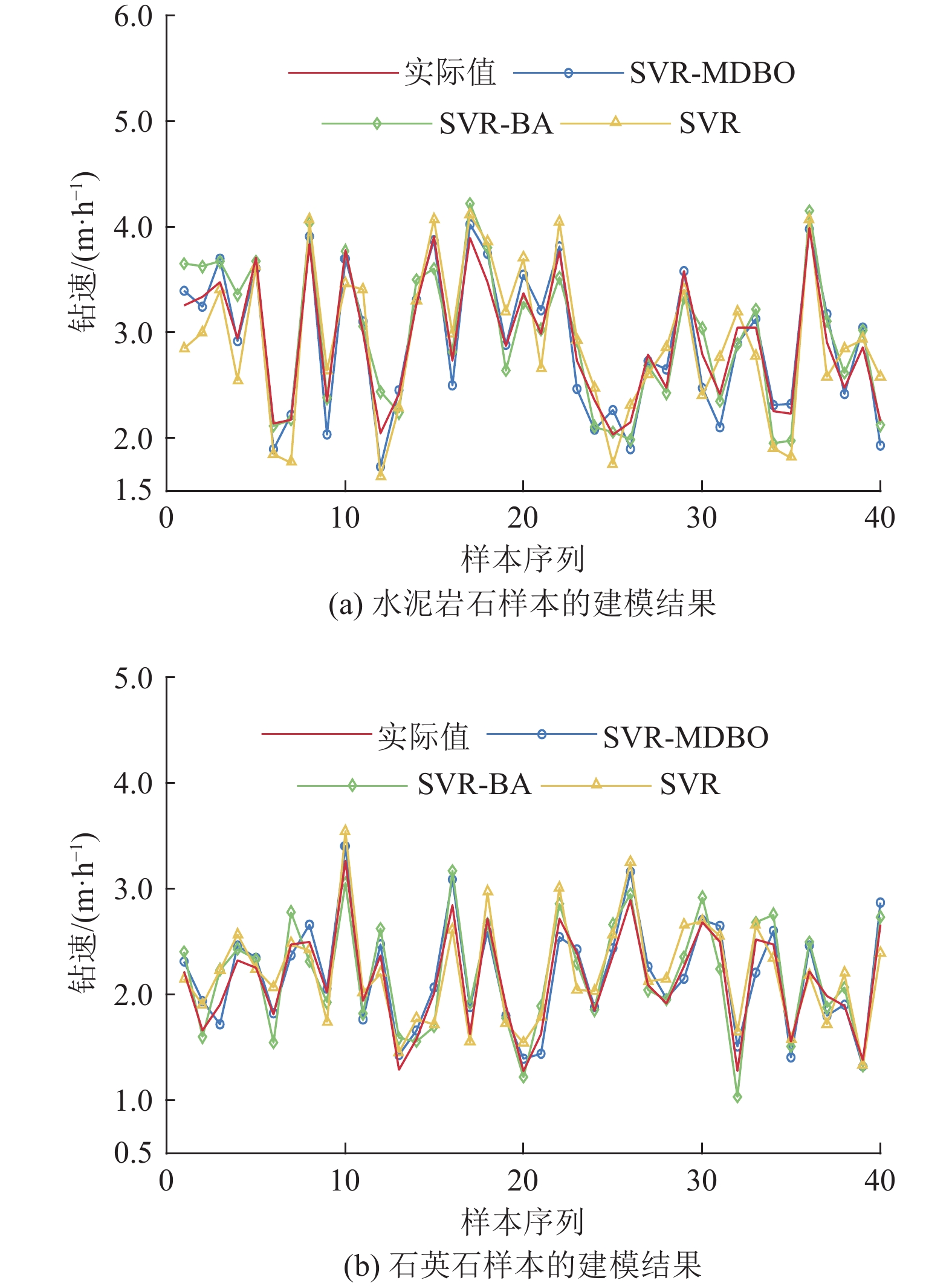
为进一步分析与验证所提建模方法的有效性,采用微型钻进实验系统对所提SVR-MDBO方法进行验证,由于实验室内所用岩石样本种类较为单一,钻速时序变化不明显,因而仅采用SVR-MDBO模型进行建模分析。在微型钻进系统中,分别采用不同岩层进行实验,实验结果如图7所示。
图7a代表的是以水泥为材料的岩石样本建模结果,图7b为以石英石为材料的岩石样本建模结果。同样采用RMSE,MAD,MAE和$ {e_{\mathrm{d}}} $作为评价指标来分析建模精度,模型评估结果见表4,其中第2到4行为水泥岩石样本建模结果,5到7行为石英石样本建模结果。
表 4 钻速模型的评估结果Table 4. Assessment results of the ROP models样本 预测模型 RMSE MAD MAE $ {e_{\mathrm{d}}} $ 水泥岩石 SVR 0.2924 0.2689 0.4141 [− 0.4085 ,0.4141 ]SVR-BA 0.2108 0.1762 0.4161 [− 0.4161 ,0.3086 ]SVR-MDBO 0.1801 0.1495 0.3180 [− 0.2709 ,0.3180 ]石英石 SVR 0.2185 0.1873 0.3901 [− 0.3901 ,0.3484 ]SVR-BA 0.1948 0.1660 0.3315 [− 0.3315 ,0.3098 ]SVR-MDBO 0.1573 0.1365 0.3099 [− 0.2689 ,0.3099 ]根据表4的结果可以得出,无论是在变化波动较大的水泥岩石样本还是波动较小的石英石样本,所提建模方法均展现出较好的建模效果,具有良好的泛化能力,能够有效应对多种不同复杂地层环境下的非线性、多模态以及高维度变化问题。
5 结 论
(1) 根据钻速变化的非线性、多工况与时序性需求,基于支持向量回归方法、改进蜣螂优化算法、M-K趋势检验与模糊C均值聚类方法,建立了一种新的钻速模型,得到了钻进参数与钻速间的映射关系,为钻进过程的优化与控制提供重要的模型基础。
(2) 通过引入权重融合、改进的回声定位、改进的局部迭代搜索、最佳解重更新策略,提出一种新的改进的蜣螂优化算法,显著提升算法的全局搜索能力,能够有效解决复杂的非凸优化问题,并确定最佳的模型参数值。
(3) 利用IEEE CEC2017基准测试函数的仿真研究可知,所提方法在多种具有大量局部最优解的非凸优化问题中均取得良好的效果。基于实际钻进数据与微型钻进系统的仿真实验可知,所提方法在多种不同的地层环境与岩石样本中均表现出良好的效果。研究结果对面向深部复杂地质钻进过程的建模方面提供了重要的理论基础,通过仿真实验证明所提方法能够适应多种不同的环境,后续的研究,将设计一套适合深部复杂地质钻进过程的控制系统,并在控制系统中对所提方法进行进一步测试与验证。
符号注释:
${C_{{\rm{pf}}}}$为超参数惩罚因子;$ b_l $和$ b_u $分别为个体的下界和上界;$ {c_j} $为聚类中心;$ {d_i} $为需要调节的样本到聚类中心的距离;${d_{{\rm{o}}i}}$为$ t_{\mathrm{e}} $与所属类别中所有样本$ {S_i} $的距离;$ F $为训练目标;$ g\left( \cdot \right) $为输出模型;$ {H_0} $为零假设;$ {H_\alpha } $为替代假设;$ I\left( i \right) $为簇内不相似度;$ M $为最大迭代次数$ \bar \omega $为融合权重;${\rm{Median}}\left( \cdot \right)$为中位数;$ n $为样本数;$ {n_1} $、$ {n_2} $、$ {n_3} $为迭代数;${N_{{\rm{sc}}}}$轮廓系数的样本数;${N_{\rm{c}}}$为预测趋势正确的样本数;${N_{\rm{r}}}$总样本数;$ O\left( i \right) $为簇间不相似度;$ R $为随机数$R \in [0,1] $;${R_{\rm{n}}}$为满足正态分布的随机数;$ S $为统计量;$ s $全局轮廓系数;$ s\left( i \right) $为各个样本的轮廓系数;$ t $为当前迭代次数;$ T $为预测趋势准确率,$ t_{\mathrm{e}} $为需要时序调节的样本;$ V_i^t $为第t轮迭代中第i个体速度;$ V\left( S \right) $为方差;$ {x_i} $为深度、钻压、转速、钻速;$ X_i^t $为第t轮迭代中第i个体位置;$ X_{ic}^t $为迭代过程中的个体最优解;$ {X_ * } $为全局最优解;$ X_i^{t - 1} $为第t−1轮迭代中第i个体位置;$X_{i * }^{{\rm{iter}}}$ 为施加扰动后的个体位置;$X_ * ^{{\rm{up}}}$为施加扰动后的全局最优解;$ {y_i} $为钻速测量值;$ Z = \left( {{{\textit{z}}_1},{{\textit{z}}_2},\cdots,{{\textit{z}}_n}} \right) $为钻速序列;$ {{\textit{z}}_j} $、$ {{\textit{z}}_k} $为序列$ Z $中第$ j $和第$k$个测量值;${Z_{{\rm{MK}}}}$为检验统计量;$ {Z_{1 - {\alpha \mathord{\left/ {\vphantom {\alpha 2}} \right. } 2}}} $为在$ 1 - {\alpha \mathord{\left/ {\vphantom {\alpha 2}} \right. } 2} $下的Z值;$ \sigma $为核函数带宽;${\omega _{{\rm{sj}}}}$为随机权重;${\tau _{{\rm{l}} }}$、${\tau _{{\rm{u}} }}$分别为随机权重的下限和上限;$ \varsigma $为常数;${\omega _{{\rm{zsy}}}}$为自适应权重;$ \eta $为常量;$ {{\mathrm{sgn}}} \left( \cdot \right) $为符号函数;$ \alpha $为显著性水平;$ \beta $为趋势变化因子。
-
表 1 4种情况的调节方式
Table 1 Four temporal regulation methods
方式 是否显著 变化趋势 调节方式 1 是 上升 $ \max \left( {{v_\text{rop}} + \beta ,{v_\text{rop}} + \left( {{{\bar v}_\text{up}} - {v_\text{rop}}} \right)} \right) $ 2 否 上升 $ \min \left( {{v_\text{rop}} + \beta ,{v_\text{rop}} + \left( {{{\bar v}_\text{up}} - {v_\text{rop}}} \right)} \right) $ 3 是 下降 $ \min \left( {{v_\text{rop}} - \left| \beta \right|,{v_\text{rop}} - \left| {{{\bar v}_\text{down}} - {v_\text{rop}}} \right|} \right) $ 4 否 下降 $ \max \left( {{v_\text{rop}} - \left| \beta \right|,{v_\text{rop}} - \left| {{{\bar v}_\text{down}} - {v_\text{rop}}} \right|} \right) $  下载: 导出CSV
下载: 导出CSV
表 2 4种优化算法的IEEE CEC2017基准函数测试结果
Table 2 Test results of IEEE CEC2017 benchmark functions for four optimization algorithms
编号 MDBO DBO GWO PSO F01 2.72×102 3.15×103 1.05×106 1.81×103 F03 3.00×102 3.00×102 5.47×102 3.00×102 F04 4.00×102 4.01×102 4.13×102 4.01×102 F05 5.26×102 5.29×102 5.13×102 5.36×102 F06 6.05×102 6.04×102 6.00×102 6.06×102 F07 7.34×102 7.38×102 7.27×102 7.18×102 F08 8.18×102 8.20×102 8.12×102 8.23×102 F09 9.22×102 9.21×102 9.24×102 9.00×102 F10 1.67×103 1.77×103 1.42×103 1.88×103 F11 1.13×103 1.14×103 1.13×103 1.12×103 F12 1.18×104 2.17×105 3.91×105 1.27×104 F13 1.84×103 7.37×103 7.52×103 7.74×103 F14 1.48×103 1.47×103 1.69×103 1.45×103 F15 1.59×103 1.63×103 2.07×103 1.55×103 F16 1.74×103 1.70×103 1.69×103 1.86×103 F17 1.75×103 1.74×103 1.75×103 1.76×103 F18 1.97×103 1.07×104 2.27×104 4.39×103 F19 1.96×103 1.99×103 3.83×103 2.11×103 F20 2.08×103 2.05×103 2.07×103 2.12×103 F21 2.21×103 2.20×103 2.31×103 2.31×103 F22 2.31×103 2.29×103 2.30×103 2.38×103 F23 2.64×103 2.62×103 2.61×103 2.70×103 F24 2.53×103 2.58×103 2.74×103 2.80×103 F25 2.92×103 2.91×103 2.94×103 2.92×103 F26 2.94×103 2.98×103 3.14×103 3.30×103 F27 3.10×103 3.09×103 3.09×103 3.14×103 F28 3.14×103 3.25×103 3.36×103 3.16×103 F29 3.23×103 3.18×103 3.17×103 3.24×103 F30 4.34×103 3.29×105 5.34×105 5.27×103 计数 11 7 8 6
下载: 导出CSV
表 3 钻速模型的评估结果
Table 3 Assessment results of the ROP models
井段 预测模型 RMSE MAD MAE $ {e_{\mathrm{d}}} $ 井段1 SVR 0.2602 0.2274 0.4169 [− 0.4169 ,0.4160 ]SVR-BA 0.2205 0.1873 0.3907 [− 0.3770 ,0.3907 ]SVR-MDBO 0.1651 0.1449 0.2750 [− 0.2546 ,0.2750 ]N1 0.2020 0.1717 0.3962 [− 0.3676 ,0.3962 ]井段2 SVR 0.2282 0.1939 0.4113 [− 0.4113 ,0.3579 ]SVR-BA 0.1856 0.1578 0.3068 [− 0.3068 ,0.2822 ]SVR-MDBO 0.1492 0.1288 0.2648 [− 0.2338 ,0.2648 ]N1 0.1547 0.1294 0.3448 [− 0.2914 ,0.3448 ]
下载: 导出CSV
表 4 钻速模型的评估结果
Table 4 Assessment results of the ROP models
样本 预测模型 RMSE MAD MAE $ {e_{\mathrm{d}}} $ 水泥岩石 SVR 0.2924 0.2689 0.4141 [− 0.4085 ,0.4141 ]SVR-BA 0.2108 0.1762 0.4161 [− 0.4161 ,0.3086 ]SVR-MDBO 0.1801 0.1495 0.3180 [− 0.2709 ,0.3180 ]石英石 SVR 0.2185 0.1873 0.3901 [− 0.3901 ,0.3484 ]SVR-BA 0.1948 0.1660 0.3315 [− 0.3315 ,0.3098 ]SVR-MDBO 0.1573 0.1365 0.3099 [− 0.2689 ,0.3099 ]
下载: 导出CSV
-
[1] 陆承达,甘超,陈略峰,等. 地质钻进过程智能控制研究进展与发展前景[J]. 煤田地质与勘探,2023,51(9):31−43. DOI: 10.12363/issn.1001-1986.23.06.0338 LU Chengda,GAN Chao,CHEN Luefeng,et al. Development and prospect of intelligent control of geological drilling process[J]. Coal Geology & Exploration,2023,51(9):31−43. DOI: 10.12363/issn.1001-1986.23.06.0338
[2] 刘永旺,李坤,管志川,等. 降低井底岩石抗钻能力的钻速提高方法研究及钻头设计[J]. 石油钻探技术,2024,52(3):11−20. DOI: 10.11911/syztjs.2024003 LIU Yongwang,LI Kun,GUAN Zhichuan,et al. Research on the method of improving ROP and designing drill bits to mitigate drillability of bottomhole rocks[J]. Petroleum Drilling Techniques,2024,52(3):11−20. DOI: 10.11911/syztjs.2024003
[3] BOURGOYNE A T,YOUNG F S. A multiple regression approach to optimal drilling and abnormal pressure detection[J]. Society of Petroleum Engineers Journal,1974,14(4):371−384. DOI: 10.2118/4238-PA
[4] DENG Yong,CHEN Mian,JIN Yan,et al. Theoretical and experimental study on the penetration rate for roller cone bits based on the rock dynamic strength and drilling parameters[J]. Journal of Natural Gas Science and Engineering,2016,36:117−123. DOI: 10.1016/j.jngse.2016.10.019
[5] ZHOU Yang,CHEN Xin,WU Min,et al. A novel modeling and drilling optimization method with suitable constraints in geological well[J]. Control Engineering Practice,2022,122:105062. DOI: 10.1016/j.conengprac.2021.105062
[6] ZHOU Yang,CHEN Xin,ZHAO Haibin,et al. A novel rate of penetration prediction model with identified condition for the complex geological drilling process[J]. Journal of Process Control,2021,100:30−40. DOI: 10.1016/j.jprocont.2021.02.001
[7] 姚宁平,吴敏,陈略峰,等. 煤矿坑道钻进过程智能优化与控制技术[J]. 煤田地质与勘探,2023,51(9):1−9. DOI: 10.12363/issn.1001-1986.22.04.0214 YAO Ningping,WU Min,CHEN Luefeng,et al. Intelligent optimization and control technology for drilling process of coal mine tunnels[J]. Coal Geology & Exploration,2023,51(9):1−9. DOI: 10.12363/issn.1001-1986.22.04.0214
[8] 曾小龙,李谦,魏宏超,等. 基于南海巨厚塑性泥岩地层特征的钻速预测模型[J]. 煤田地质与勘探,2023,51(11):159−168. DOI: 10.12363/issn.1001-1986.23.06.0307 ZENG Xiaolong,LI Qian,WEI Hongchao,et al. Rate–of–penetration (ROP) prediction model based on formation characteristics of extremely thick plastic mudstone in South China Sea[J]. Coal Geology & Exploration,2023,51(11):159−168. DOI: 10.12363/issn.1001-1986.23.06.0307
[9] 甘超,汪祥,王鲁朝,等. 基于区域多井数据优选与模型预训练的深部地质钻探过程钻速动态预测方法[J]. 钻探工程,2023,50(4):1−8. DOI: 10.12143/j.ztgc.2023.04.001 GAN Chao,WANG Xiang,WANG Luzhao,et al. Dynamic prediction method of rate of penetration (ROP) in deep geological drilling process based on regional multi–well data optimization and model pre–training[J]. Drilling Engineering,2023,50(4):1−8. DOI: 10.12143/j.ztgc.2023.04.001
[10] AHMED O S,ADENIRAN A A,SAMSURI A. Computational intelligence based prediction of drilling rate of penetration:A comparative study[J]. Journal of Petroleum Science and Engineering,2019,172:1−12. DOI: 10.1016/j.petrol.2018.09.027
[11] 沙林秀,胥陈卓. 基于主成分分析的NCPSO–BP机械钻速预测[J]. 石油钻采工艺,2022,44(4):515−521. SHA Linxiu,XU Chenzhuo. Prediction of NCPSO–BP ROP based on principal component analysis[J]. Oil Drilling & Production Technology,2022,44(4):515−521.
[12] 周长春,姜杰,李谦,等. 基于融合特征选择算法的钻速预测模型研究[J]. 钻探工程,2022,49(4):31−40. DOI: 10.12143/j.ztgc.2022.04.005 ZHOU Changchun,JIANG Jie,LI Qian,et al. Research on drilling rate prediction model based on fusion feature[J]. Drilling Engineering,2022,49(4):31−40. DOI: 10.12143/j.ztgc.2022.04.005
[13] GAN Chao,CAO Weihua,WU Min,et al. Prediction of drilling rate of penetration (ROP) using hybrid support vector regression:A case study on the Shennongjia area,Central China[J]. Journal of Petroleum Science and Engineering,2019,181:106200. DOI: 10.1016/j.petrol.2019.106200
[14] ASHRAFI S B,ANEMANGELY M,SABAH M,et al. Application of hybrid artificial neural networks for predicting rate of penetration (ROP):A case study from Marun Oil Field[J]. Journal of Petroleum Science and Engineering,2019,175:604−623. DOI: 10.1016/j.petrol.2018.12.013
[15] MEHRAD M,BAJOLVAND M,RAMEZANZADEH A,et al. Developing a new rigorous drilling rate prediction model using a machine learning technique[J]. Journal of Petroleum Science and Engineering,2020,192:107338. DOI: 10.1016/j.petrol.2020.107338
[16] ZHOU Yang,LU Chengda,ZHANG Menglin,et al. A novel rate of penetration model based on support vector regression and modified bat algorithm[J]. IEEE Transactions on Industrial Informatics,2023,19(5):6659−6668. DOI: 10.1109/TII.2022.3205374
[17] LIU Ye,ZHANG Fuqiang,YANG Shuopeng,et al. Self–attention mechanism for dynamic multi–step ROP prediction under continuous learning structure[J]. Geoenergy Science and Engineering,2023,229:212083. DOI: 10.1016/j.geoen.2023.212083
[18] ZHAO Guoyu,AN Jianqi,GUO Yunpeng,et al. A multi–time–scale multi–step prediction method for gas utilization rate in a BF based on just–in–time learning[J]. Control Engineering Practice,2024,147:105940. DOI: 10.1016/j.conengprac.2024.105940
[19] XUE Jiankai,SHEN Bo. Dung beetle optimizer:A new meta–heuristic algorithm for global optimization[J]. The Journal of Supercomputing,2023,79:7305−7336. DOI: 10.1007/s11227-022-04959-6
[20] GAN Chao,CAO Weihua,LIU Kangzhi,et al. A new hybrid bat algorithm and its application to the ROP optimization in drilling processes[J]. IEEE Transactions on Industrial Informatics,2020,16(12):7338−7348. DOI: 10.1109/TII.2019.2943165
[21] YANG Zhiheng,NIU Xiaojing. Trends of extreme waves around Hainan Island during typhoon processes[J]. Ocean Engineering,2024,308:118247. DOI: 10.1016/j.oceaneng.2024.118247
[22] HU Jie,WU Min,CHEN Luefeng,et al. Weighted kernel fuzzy c–means–based broad learning model for time–series prediction of carbon efficiency in iron ore sintering process[J]. IEEE Transactions on Cybernetics,2022,52(6):4751−4763. DOI: 10.1109/TCYB.2020.3035800
[23] DU Peng,LI Fenglian,SHAO Jianli. Multi–agent reinforcement learning clustering algorithm based on silhouette coefficient[J]. Neurocomputing,2024,596:127901. DOI: 10.1016/j.neucom.2024.127901

计量
- 文章访问数: 35
- HTML全文浏览量: 1
- PDF下载量: 8

